1月29日,实验室主任丁建宁教授与美国德克萨斯州立大学达拉斯分校雷伊·鲍曼院士课题组等国际团队合作,在新一期国际顶级学术期刊《科学》(Science)杂志上刊文“Unipolar stroke, electroosmotic pump carbon nanotube yarn muscles”,提出了一种新型高性能电化学驱动人工肌肉,探索出了人工肌肉全新的驱动机理,大大推动了纤维人工肌肉的应用。
研究工作得到了国家自然科学基金委共融机器人基础理论与关键技术研究重大研究计划培育项目的资助。
人工肌肉是依照动物骨骼肌功能,设计出的具有高输出应变、高输出能量、高输出功率以及大负载能力的柔性驱动器。因其体积小、运动自由度高、环境适应性好,在机器人、柔性机械电子、生物医疗、精准微创手术等领域都有着广阔的应用前景。
早在2015年,丁建宁团队与雷伊·鲍曼课题组等国际团队合作,成功将普通的橡胶复合碳纳米管材料制成超弹性导电体,相关成果发表于《科学》(Science)杂志( Science 24 July 2015; Vol.349 No.6246 pp.400-404 ),2016年被美国Discover杂志评为世界100项重大发现之一,世界著名材料学家图莎尔•戈什在同期《Science》发专文评述:其在仿生柔体机器人、可穿戴电子设备、柔性太阳能电池等新能源器件以及传感器等方面有巨大应用前景。此后,鲍曼课题组和合作团队研制了碳纳米管纤维电化学驱动人工肌肉,但该肌肉只能实现单向驱动。
在前期研究基础上,丁建宁团队与雷伊·鲍曼课题组等国际团队合作深入研究,使用离子交换聚合物改变碳纳米管纤维的零电荷电位,突破了单向驱动瓶颈,实现了双向驱动。通过调整电压,人工肌肉不仅能收缩,还能延长,做到了“伸缩自如”,而且驱动应变能力提高了4倍。胡兴好解释说,人工肌肉对外界的输出功率和转化效率都能得到大幅度提升,就相当于人工肌肉可以轻松举起自身体重10万倍的重物。
然而,这种应变效应究竟来自哪里?通过近三年的研究,课题组发现了一种完全不同的驱动机理,这种人工肌肉能够将更多的自由水分子吸附到纤维中,使得驱动性能进一步提升。
响应慢、驱动小、单向驱动等,一直是影响电化学碳纳米管纤维人工肌肉应用推广的“卡脖子”难题。目前,团队提出的这种新型电化学人工肌肉可以实现在一定频率范围内应变随频率增加而增大的效应。丁建宁认为,“高频响应驱动器应用潜力巨大。比如在仿生飞行器中,这样的柔性材料就能适应飞行器高频响应的需要。”
在此研究基础上,课题组还分别使用阴离子和阳离子聚合物,成功制备全固态电解液人工肌肉,避免了液态电解液的使用,使得人工肌肉的实用性大大增强。
丁建宁表示,“拓展人工肌肉的工作频率和工作温度,以适应更广泛的柔性机械电子系统和外骨骼机器人的应用需求,是课题组未来的努力方向之一。”
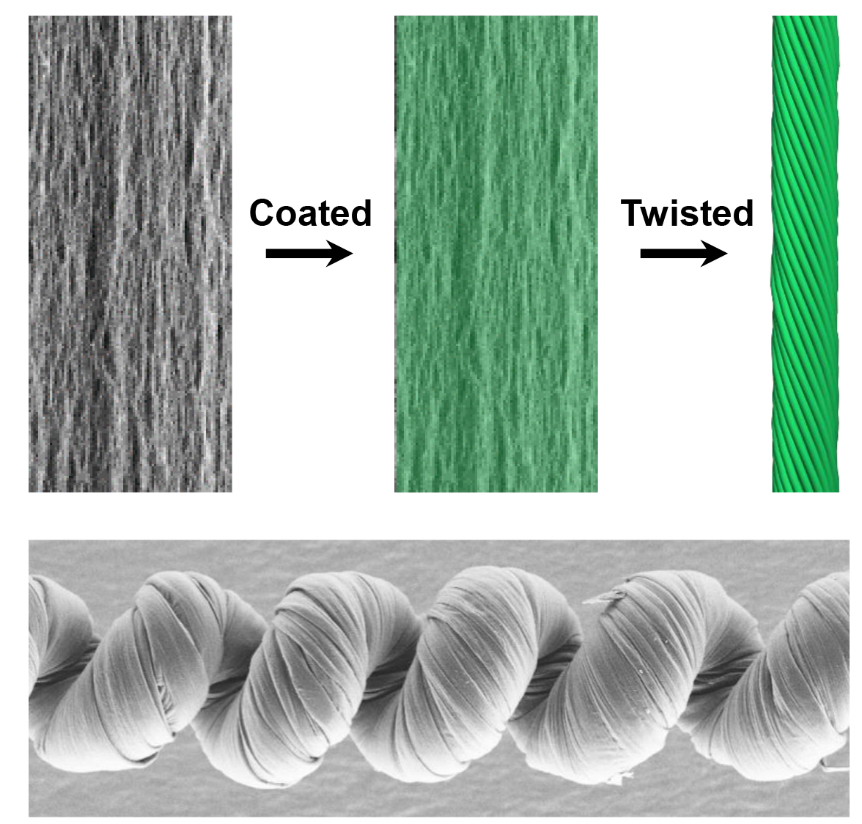
新型快速驱动电化学人工肌肉
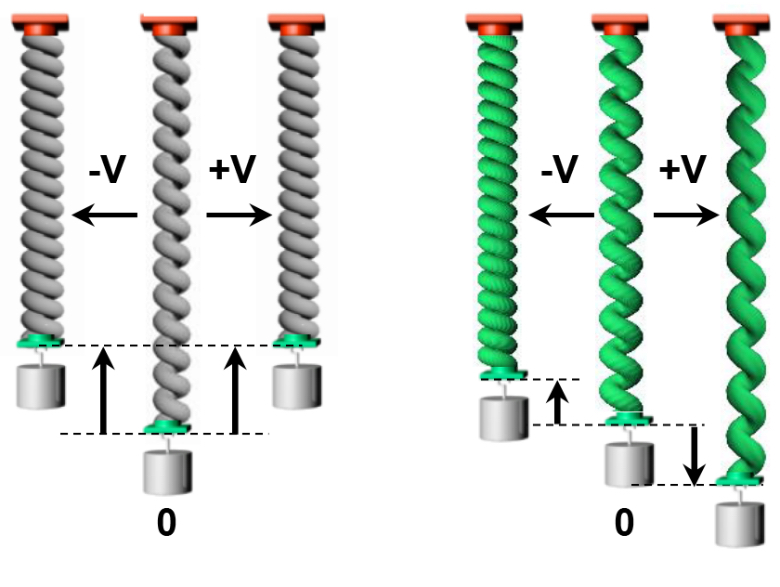
新型人工肌肉实现了由单向驱动转变为双向驱动
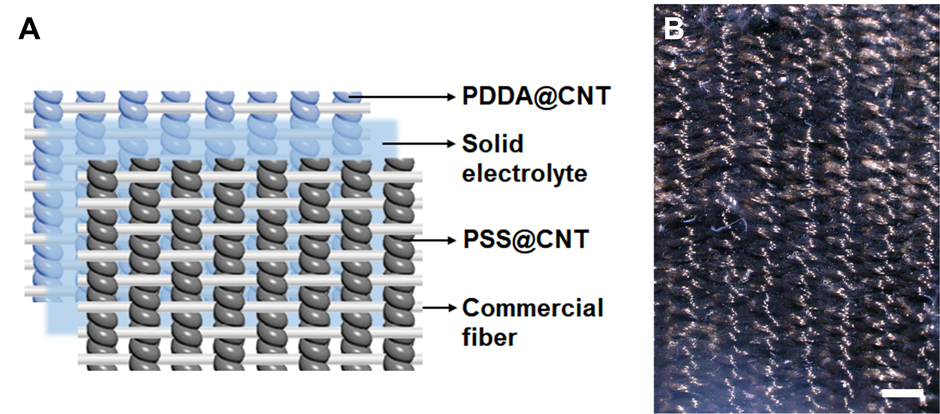
全固态电解液人工肌肉编织成智能织物
原文地址:http://www.sciencemag.org/content/371/6528/494